$\definecolor{red}{RGB}{255,0,0}$$\definecolor{black}{RGB}{0,0,0}$
v
x
v
x
v
x
v
x
=
V·cosα
α
α
o
α
V
V
V
h
o
h
o
h
o
t
t
t
v
o
v
o
v
o
v
o
=
V·sinα
v
y
v
y
v
y
v
y
=
g·t-V·sinα
v
y
=
g·d/(V·cosα)-V·sinα
V
d
V
d
v
y
V
d
=
((g
2
·d
2
)/(V
2
cos
2
α)-2·g·d·tanα+V
2
)
1/2
=
V
d
=
(V
2
+g
2
·t
2
-2·V·g·t·sinα)
1/2
d
H
d
H
d
H
d
H
=
V
2
·cosα·sinα/g
t
H
t
H
t
H
t
H
=
V·sinα/g
H
H
H
H
=
h
o
+V
2
·sin
2
α/(2·g)
h
h
h
h
=
V
2
·sin
2
α/(2·g)+g·d
2
/(2·V
2
·cos
2
α)-d·tanα
h
=
g·t
2
/2+ V
2
·sin
2
α/(2·g)+V·sinα
d
d
d
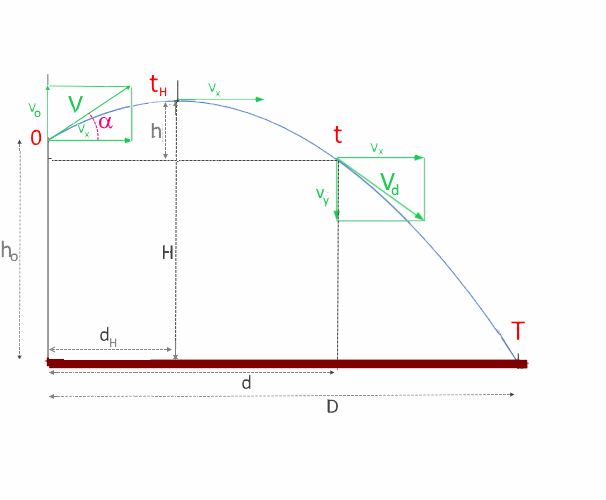
Projection oblique: vitesses, distances obliques et verticales, temps "
→ Retour à la liste complète des formules
 → Retour à la liste complète des formules
→ Retour à la liste complète des formules